")





a) Schematizzazione sistema auto-interrante; b) cavalletto per la deposizione; c) test sistema idraulico e ugello disperdente per la deposizione dell’OBS; d) modulo multiparametrico pronto per la deposizione; e) modulo multiparametrico in fase di deposizione; f) testa del conductor pipe a fine deposizione (prima della chiusura); moduli di superficie dell’OBS e del modulo multiparametrico a bordo della piattaforma.
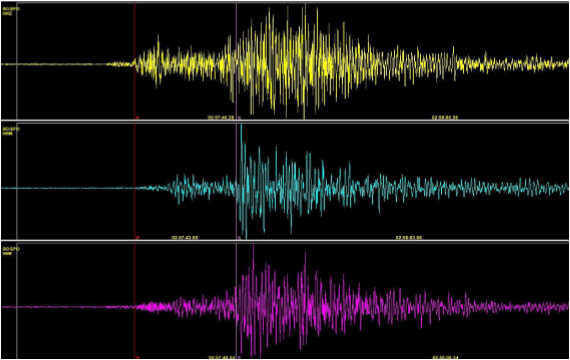
Evento 18 aprile 2020 ore 02:57 UTC Poggio Imperiale (FG) Ml 3.7
D’Anna G.1, Fertitta G.1, Costanza A.1, Delladio A.3, Sensale G.2, Stramondo S.3
1 Istituto Nazionale di Geofisica e Vulcanologia, Osservatorio Nazionale Terremoti, OBS & Earth Lab di Gibilmanna
2 Istituto Nazionale di Geofisica e Vulcanologia, Amministrazione Centrale, Centro Servizi Informatici
3 Istituto Nazionale di Geofisica e Vulcanologia, Osservatorio Nazionale Terremoti
In data 4 maggio 2018, tra DGS-UNMIG, INGV e Assomineraria è stato siglato un Accordo Quadro per l’attività di collaborazione scientifica. Successivamente, in data 17 maggio 2018, DGS-UNMIG, INGV, ed EDISON SpA quale associato di Assomineraria, hanno inteso dare seguito a tale accordo attraverso una Convenzione Attuativa con la quale le parti hanno manifestato la volontà di avviare una cooperazione scientifica avente per oggetto i temi previsti dall’Accordo Quadro. Come prima attuazione delle predetta Convenzione, Edison ha messo a disposizione il conductor pipe D della piattaforma Rospo Mare C (RSM-C), situata al largo della costa di Vasto (CH). All’interno del conductor pipe è stato installato il sismometro da fondo mare (Nanometrics Trillium OBS 120 s – 100 Hz) e un sistema multiparametrico, che acquisiscono i dati e li trasferiscono, in tempo reale, tramite la rete messa a disposizione da Edison, alla sala di monitoraggio INGV di Roma. L’installazione, per questioni meteo-marine e logistiche è avvenuta in diverse fasi (figura 1b-g), iniziate a Luglio 2019 e concluse a Gennaio 2020.
Al fine di minimizzare il rumore, è stato progettato il sistema auto-interrante illustrato in figura 1a. Tale sistema prevede un circuito idraulico (in rosso) che convoglia una portata di acqua in pressione, dalla testa del pozzo al cono inferiore solidale al sismometro. L’acqua, fuoriuscendo da un ugello, unitamente ad una discesa controllata tramite fune, ha consentito un totale autointerramento del sensore sul fondale. Il sistema di convogliamento di acqua in pressione potrà essere nuovamente attivato nella fase di recupero per facilitare l’estrazione del sensore e dei due coni; la geometria di questi ultimi è stata studiata per facilitare la penetrazione durante la fase di deposizione e l’estrazione durante la fase di recupero. A tal proposito, si è provveduto anche al progetto di un ugello disperdente che, oltre a scavare i sedimenti, li allontani dalla zona centrale.
Il sismometro, posto sul fondale del conductor pipe D, capta le onde sismiche e le invia a un digitalizzatore Guralp DM24 posto nel vessel dell’elettronica (figura 1a). I dati digitali, convertiti in segnali RS-485, transitano poi sul cavo dati, che connette gli apparati sottomarini a quelli di superficie (figura 1g). Questo cavo, lungo circa 200 m, ha anche la funzione di alimentare gli apparati sottomarini tramite l’energia elettrica proveniente da un sistema di alimentazione autonomo operativo a bordo della piattaforma petrolifera. Il sistema di acquisizione locale Guralp EAM-U, collocato a bordo della piattaforma, riceve i dati digitali e li converte in formato SEED. Un server SEEDLink rende i dati accessibili dall’esterno a un client SEEDLink remoto. Da Gennaio 2020, l’OBS installato funziona regolarmente ed è entrato a far parte della Rete Sismica Nazionale. I segnali sono resi disponibili attraverso una canale VPN crittografato operativo tra la rete EDISON e la rete I.N.G.V. di Roma.
I segnali risultano accessibili attraverso la nostra sede di Roma dove vengono acquisiti in tempo reale presso la sala di monitoraggio sismico. In fig. 2 un evento registrato dalla stazione di ROSPO.